Lorsque la première mise en circulation de voitures semi-autonomes de niveau 3 dans le courant de l’année 2023 était annoncée, il restait encore des questions auxquelles il convenait d’apporter des réponses. L’un des enjeux techniques concerne la reprise en main du véhicule après une phase de délégation de conduite. En effet, ces véhicules permettraient en théorie de pouvoir réaliser des tâches annexes pendant la phase automatisée, comme la lecture, le visionnage de vidéos ou encore jouer à des jeux sur son téléphone. Néanmoins, toutes ces tâches sont distrayantes et accaparent l’attention visuelle, auditive et cognitive du conducteur, à tel point que celui-ci risque de se retrouver incapable de gérer une reprise en main demandée en urgence par le système automatisé.
Dans un contexte où le niveau d’automatisation progresse et risque d’engendrer une rupture technologique et comportementale avec les véhicules manuels, peut-on penser que notre expérience de conduite sur les véhicules manuels est transférable aux véhicules à conduite automatisée ? En d’autres termes, saura-t-on conduire un véhicule à conduite automatisée si l’on sait déjà conduire un véhicule manuel ?
L’équipe du projet Relearn Drive, composée de chercheurs de l’Université d’Aix-Marseille et du CNRS, s’est intéressée à cette problématique, en explorant le besoin de formation pour réapprendre à conduire. En effet, des analyses d’accidents impliquant des véhicules à conduite automatisée, principalement aux Etats-Unis, montrent que ces accidents sont causés par une incompréhension des capacités du système (le conducteur ne sait pas réellement de quoi est capable son véhicule), ou encore par une perte de compétences de conduite. C’est cette dernière cause qui est investiguée dans la recherche : risque-t-on de trop se reposer sur les aides à la conduite, quitte à en perdre nos compétences de conduite ?
Ce projet, subventionné par la Délégation à la sécurité routière, s’interroge donc sur la pertinence d’une formation spécifique à la conduite de véhicules à conduite automatisée.
Une expérience sur simulateur pour répondre à la question
Afin de répondre à la question de recherche et de déterminer s’il est nécessaire de réapprendre à conduire sur ces types de véhicules, l’équipe projet a mis en place une expérimentation, comme présenté ci-après :

Simulateur de conduite utilisé dans le cadre du projet
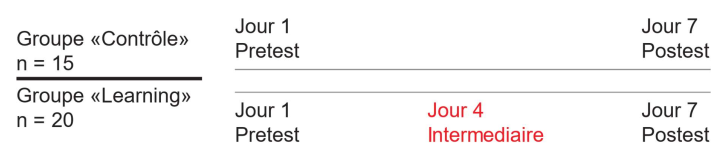
35 personnes ont été mobilisées, réparties en 2 groupes : un groupe « contrôle » qui n’a pas reçu de formation à la conduite automatisée, et un groupe « apprentissage » qui lui a reçu cette formation à mi-chemin de l’expérimentation.
Les participants des 2 groupes ont tous conduit sur simulateur une première fois, ce qui a permis d’obtenir des résultats de référence. Lors de cette phase « pré-test », les individus ont conduit dans une simulation de réseau 2x2 voies à 110 km/h, avec 3 scénarios successifs de reprise en main imposant des degrés d’urgence variables, pour un trajet d’environ 30 minutes. Dans chacun des 3 scénarios, la conduite est automatisée et le participant jouait à un jeu sur tablette, avant qu’un événement perturbateur n’oblige le conducteur à reprendre le véhicule en main (exemple : apparition soudaine d’un obstacle sur la chaussée).
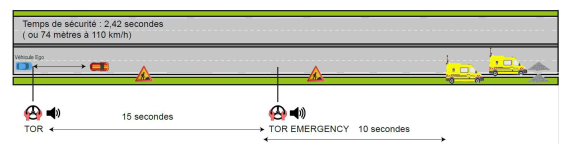
Illustration du premier événement lié à une demande de reprise en main.
Ici le temps disponible avant d’atteindre les limites du système (collision) est de 25 secondes.
C’est ce qu’on appelle une requête planifiée.
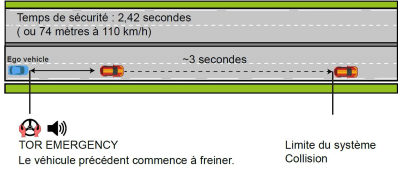
Illustration du deuxième événement lié à une demande de reprise en main.
Ici le temps disponible avant d’atteindre les limites du système (collision) est d’environ 6 secondes.
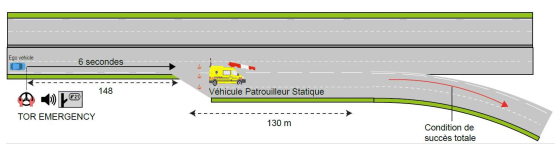
Illustration du troisième évènement lié à une demande de reprise en main. Ici le temps disponible
avant d’atteindre les limites du système (collision) est d’environ 6 secondes,
la présence de l’obstacle est associée à une information GPS affichée sur le HUD.
La condition de succès est d’éviter l’obstacle et de respecter l’instruction GPS.
Pour mesurer les performances des conducteurs et les comparer entre eux, l’équipe projet a choisi des indicateurs comme le nombre d’accidents, le temps pour reprendre le véhicule en main et la vitesse minimale relevée après récupération du contrôle du véhicule.
Après cette session de conduite « pré-test », une semaine a passé avant de refaire le même exercice pour la session « post-test ». Dans ce temps, le groupe « apprentissage » a bénéficié de modules pratiques d’entraînement à la conduite automatisée. Cette phase intermédiaire permettait aux participants de s’entraîner sur divers scénarios aux caractéristiques variables (météo, densité du trafic, type de réseau, délai de reprise en main etc.). Le principe était de vérifier si le groupe « apprentissage » obtenait des meilleurs résultats lors de la session post-test grâce aux modules d’entraînements.
La formation et la répétition améliorent les performances de reprise en main du véhicule
Tout d’abord, du point de vue de l’accidentalité, 14 accidents ont été observés sur un total de 210 situations de reprise en main pour l’ensemble des participants. Dans le groupe contrôle (15 individus dans 6 simulations de reprise en mains, soit 90 situations), 5 accidents ont été observés. 2 accidents sont arrivés en phase « pré-test » et 3 accidents en phase « post-test », en soulignant que ces 3 accidents sont arrivés dans le scénario numéro 3 qui a changé entre les deux phases pour limiter l’effet d’apprentissage. Pour le groupe apprentissage, 9 accidents ont été relevés : 3 en phase « pré-test » et 6 en « post-test », également sur le scénario 3 qui a changé entre les deux phases.
D’un point de vue mécanique, l’indicateur de performance analysé est le temps nécessaire pour désactiver la fonction autonome lorsque le système demande au conducteur de reprendre le véhicule en main. Le graphique ci-dessous présente l’évolution de ces temps avant et après phase d’entraînement pour le groupe « apprentissage », pour chacun des 3 scénarios. Les résultats montrent que la pratique répétée permet aux participants de réduire ce délai de désactivation, de 3,2 secondes pour le scénario n°1 (délai de 25 secondes accordé pour la reprise en main avant accident) à 320 millisecondes pour le scénario n°3 (délai de 6 secondes seulement). Par comparaison, le groupe « contrôle » n’a obtenu des meilleurs résultats que pour 1 scénario sur les 3.
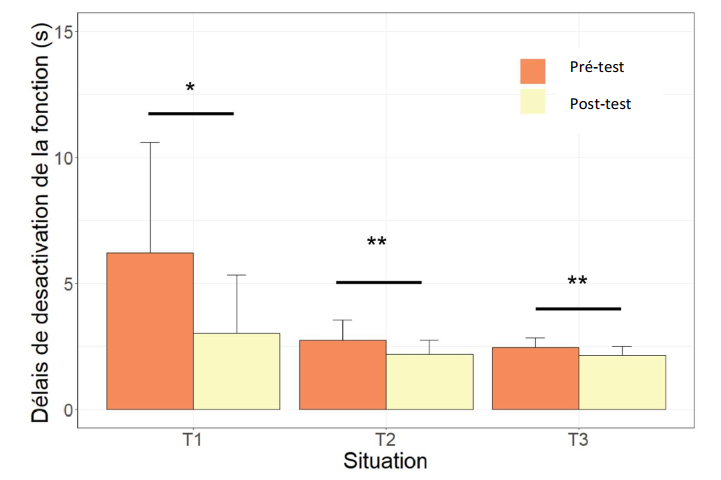
Évolution du temps nécessaire pour désactiver la fonction autonome
avant et après la phase d’entrainement pour le groupe « apprentissage »
D’un point de vue comportemental, un autre indicateur choisi par l’équipe de recherche est le contrôle de la vitesse lors de la reprise en main et de la gestion de la manœuvre (exemple : éviter un véhicule garé dans la bande d’arrêt d’urgence). Il ressort que le groupe « apprentissage » fait preuve d’un comportement plus prudent, tandis que le groupe « contrôle » a tendance à réaliser sa manœuvre plus brusquement et à plus grande vitesse. En outre, les capacités d’adaptation au nouveau scénario de conduite n°3 sont plus homogènes dans le groupe « apprentissage ».
A noter qu’au sein de la population « apprentissage », les individus plus expérimentés font des manœuvres moins dangereuses car à vitesse plus faible. Ceci corrobore l’idée selon laquelle la répétition et l’entraînement sur des situations variées permettent de créer des réponses adaptées aux urgences et confortent les comportements sécuritaires.
Ne pas confondre répétition et formation
Si les participants du groupe « apprentissage » ont montré des meilleurs résultats lors de l’expérimentation, des cas d’accidents ont persisté lors de la session « post-test ». Toutefois, la session intermédiaire réservée au groupe « apprentissage » est non supervisée, les conducteurs ne reçoivent pas de consignes sur les bonnes pratiques et doivent apprendre par eux-mêmes. L’apprentissage des compétences nécessaires à la conduite automatisée n’est donc pas optimal et reste intrinsèque à chaque individu. En définitive, ce n’est pas tant la quantité d’entrainements qui importe mais plutôt la qualité de la formation qui est primordiale.